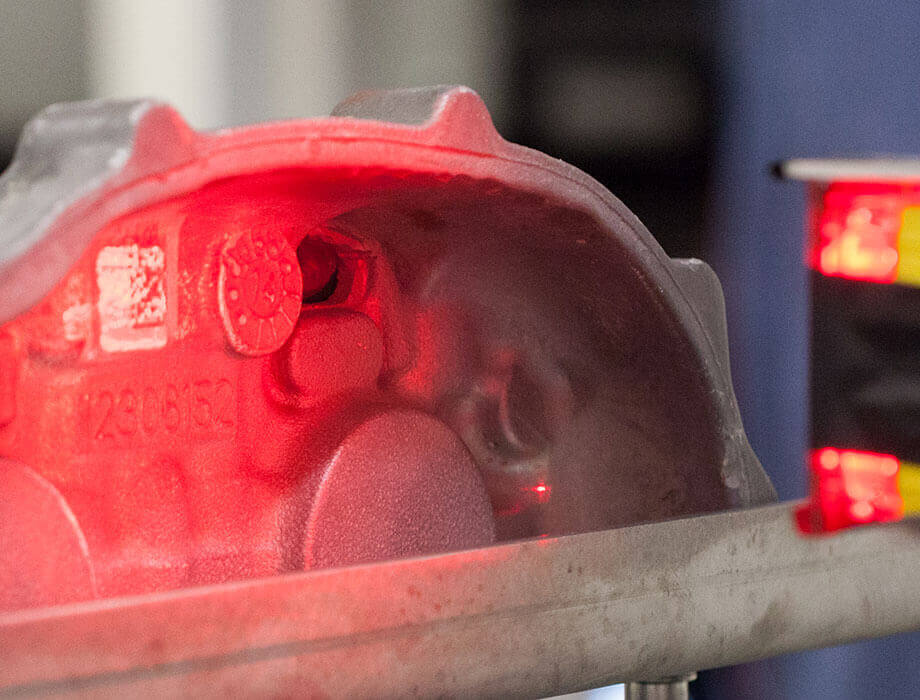
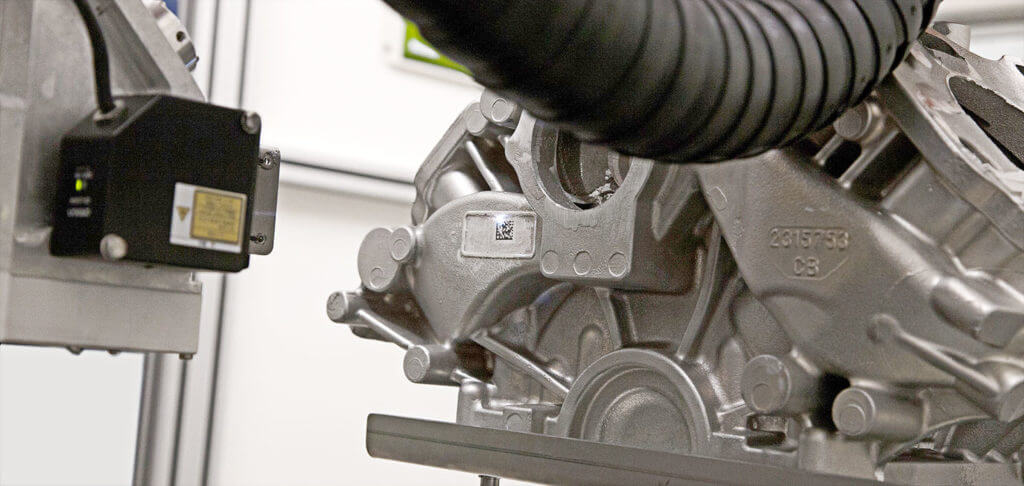
Los shuttles no prevén ninguna especialización porque es el sistema de visión el encargado del objetivo de los detalles que se deben marcar, recubriendo la totalidad del área del campo de trabajo. Examinemos el caso en el que la fusión esté mal ubicada, no alineada o posicionada más allá de un ángulo límite: la máquina genera una alarma sonora y el shuttle sale de la celda para que el operador pueda volver a colocar la pieza.
La máquina, si se conecta a un servidor SMTP, puede automáticamente enviar un correo electrónico a una o más direcciones preconfiguradas con las especificaciones de la anomalía.
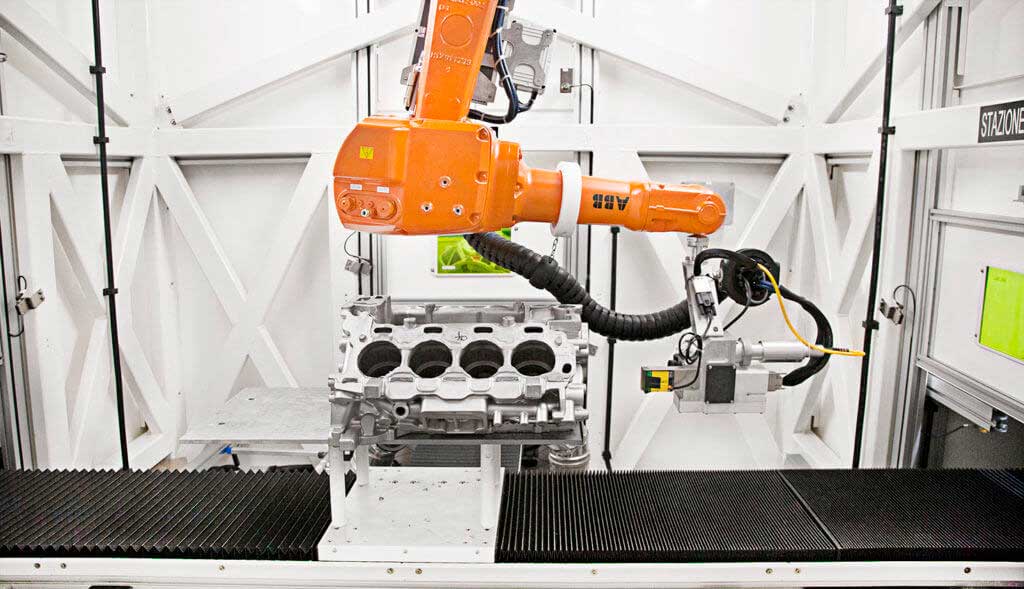
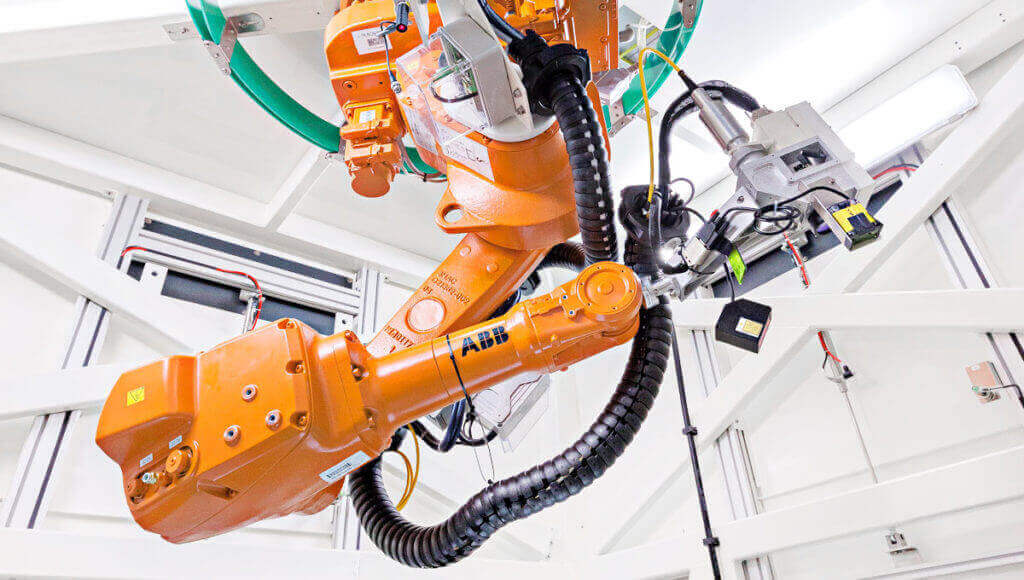
El corazón de esta celda está constituido, naturalmente, por el robot de seis ejes de movimiento, al que se fijan el cabezal de escaneo 3D, el láser, el sistema de visión y el medidor de distancia.